




Forschungs-Uboot "Euronaut"
- Der Wrackzeichner

- 14. Apr. 2024
- 9 Min. Lesezeit
12 Jahre Entwicklung, weitere 12 Jahre Bau, 60 Tonnen Material und ein Geldwert von zwei Einfamilienhäusern. Das ist der Aufwand zur Erfüllung eines Kindheitstraums vom eigenen Privat-Uboot. Im Jahr 2009 bin ich während meines Studiums dem Projekt "Euronaut" beigetreten und habe es bis 2020 begleitet. In den acht Jahren nach dem Stapellauf habe ich mit dem Boot insgesamt ca. 1250 Seemeilen zurückgelegt, 37 Tauchfahrten unternommen und fast 17 Stunden in der Taucherschleuse auf Tiefe mit einem halben Dutzend Unterwasserausstiege verbracht. Im Grunde genommen, verdanke ich dem Uboot heute nicht nur das Tauchen als lebensfüllendes Hobby, sondern auch meinen beruflichen Werdegang als Schiffbauingenieur.

Projektmotivation
Wie erreicht man als Sporttaucher unerforschte kleinere oder tiefere Wracks weit abseits typischer küstennaher Tauchgebiete, wenn sich der Aufwand für ein hinreichend seetüchtiges Schiff mit genügender Decksfläche und Unterbringungsmöglichkeiten nicht lohnt? Und wie gewinnt man etwas mehr Grundzeit, um diese Wracks nach allen Regeln der Kunst zu vermessen und zu dokumentieren, ohne anschließend stundenlang in der Dekompression an einer Leine vor sich hin frieren zu müssen? Was tun, wenn man lediglich eine Privatperson ist und
keinen Zugriff auf die technischen und finanziellen Mittel einer Forschungsorganisation oder gar der Militärs hat? Eine mögliche, auch wenn sehr ungewöhnliche Antwort darauf: man baut sich dafür ein eigenes ein Uboot. Im Grunde genommen, genauso ist die "Euronaut" entstanden - ein diesel-elektrisches Forschungs-Uboot zur Taucherverbringung.

Einmann-Uboot "Sgt. Pepper's". Daneben Stefan Tietze mit EXIVE-Rebreather aus Eigenentwicklung an Bord des Tauch- und Expeditionsschiffs „Fritz Reuter“
Initiiert und großenteils selbstständig durchgeführt wurde dieses Projekt vom deutschen Schiffbauingenieur Carsten Standfuß. Bereits mit 18 Jahren hat er sein erstes Einmann-Uboot gebaut. Laut dem Guinness-Buch der Rekorde war sein „Sgt. Pepper's“ damals mit einem Leergewicht von nur 575 kg das kleinste bemannte Tauchboot der Welt und brachte es nach allen Modifikationen immerhin zu einer Betriebstauchtiefe von 200 Metern. Schon eine kurze Zeit später entstand die Idee eines ungleich größeren Ubootes, das als eine mobile Taucherkammer und das Mutterschiff operieren sollte. Ziel war die Erforschung von unbekannten Wracks der Nordsee in Tiefen und Gebieten, die für Taucher mit herkömmlichen Mitteln nur für kurze Zeit, wenn überhaupt, erreichbar sind. Die Entwicklung des Ubootes begann im Jahr 1988 und begleitete Standfuß 12 Jahre lang sowohl durch sein Studium als auch durch sein Berufsleben als Konstrukteur von Seenotrettungskreuzern, Behördenfahrzeugen und Luxusyachten. Anschließend wurde das Boot im Juli 2000 nahe Bremen auf Kiel gelegt. Der Druckkörper als der sicherheitsrelevanteste Teil wurde von einem Unternehmen gefertigt, das sonst auf die Herstellung von Prozesstürmen und Druckbehältern für die chemische Industrie spezialisiert ist. Den Rest des Fahrzeugs hat Standfuß auf der Lürssen Werft (vormals Schweers Werft) im niedersächsischen Bardenfleth gebaut. Die Unterstützung fand der gebürtige Bremerhavener durch ein Team von Enthusiasten, das mehrheitlich aus Technikern und Ingenieuren bestand. Bis nach Dänemark, Norwegen und in die Niederlande reichte der Kreis der Helfer. Zusätzlich zum Uboot selbst, beschäftigte sich einer der damaligen Team-Mitglieder mit der Entwicklung eines neuartigen Kreislauftauchgerätes.

"Euronaut" auf einem Werksgelände neben dem Haus des Entwicklers im August 2009.
Nach der Fertigstellung des Rumpfs wurde die "EURONAUT" auf ein nahgelegenes Werksgelände an der Weser transportiert, welches nur durch einen Zaun vom Haus des Entwicklers getrennt war. So konnte die Arbeit am Projekt nach dem Feierabend, wochenends und im Urlaub weitergehen. Nach einer Bauzeit von insgesamt 12 Jahren wurde das Uboot im Juli 2012 auf demselben Gelände, auf dem der Bau begonnen hatte, vom Stapel gelassen. Im Oktober 2013 zog Standfuß nach Rostock um, und so wurde das Boot auf eigenem Kiel von seinem Heimathafen in Brake durch den Nord-Ostsee-Kanal zum neuen Liegeplatz im Werftbecken der Tamsen Maritim Werft verlegt.

"Euronaut" mit zwei ferngesteuerten Modellen beim Stapellauf im Juli 2012
Während der langen Projektlaufzeit hat die Mannschaft immer wieder Veränderungen erfahren. Zeitweise zählte das Team ein gutes Dutzend Freiwillige, die je nach verfügbarer Freizeit am Uboot mitgearbeitet haben, damit gefahren sind und an der Instandhaltung teilgenommen haben. Darunter gab es immer wieder auch ehemalige Ubootfahrer. Der aktive Kern bestand aus einer Handvoll Enthusiasten und dem Skipper selbst, der auch die Projektfinanzierung bereitstellte. Die Kosten für Kraftstoff, Proviant und andere Verbrauchsstoffe für die Ausfahrten wurden untereinander aufgeteilt.

Missionskonzept
Das Uboot „Euronaut“ wurde für eine nichtgewerbliche Nutzung entwickelt. Die Tatsache, dass es als ein rein privatfinanziertes Hobbyprojekt mit stark begrenzten Mitteln entstanden ist, bestimmt im Wesentlichen die getroffenen Entwurfs- und Konstruktionsentscheidungen. Das Missionskonzeptkonzept sieht autonome Expeditionen vor, bei denen kein Begleit- oder Mutterschiff benötigt wird. Im Gegensatz zu den militärischen Ubooten handelt es sich um ein Tauchboot im klassischen Sinne, welches seine Transitstrecken ausschließlich über Wasser zurücklegt. Lediglich das Absuchen eines Wrackgebietes mit eigener Sensorik erfolgt getaucht in unmittelbarer Grundnähe, wo optimale Bedingungen für den Einsatz von Aktivsonaren vorliegen. Im Flachwasser ist die Wracksuche auch von der Oberfläche aus durchführbar. Ist die Position des Wracks genau bestimmt, legt sich das Uboot in dessen Nähe für den Tauchereinsatz auf Grund. Demnach ist eine große Unterwasserreichweite eher unwichtig. Des Weiteren fehlt dem Uboot die Fähigkeit zum Schnorcheln, da für ein ziviles Fahrzeug keine Notwendigkeit besteht verdeckt zu operieren. Ganz im Gegenteil, die Betriebssicherheit im Seeverkehr erfordert es, möglichst gut von Berufsschifffahrt und Sportbooten oder Seglern gesehen zu werden.

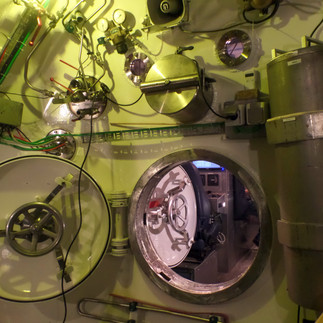




Bootseigene Taucherschleuse
Das Herzstück des Ubootes ist eine ca. 7,5 m³ große 2-Mann Taucherkammer, die im Vorschiff lag und durch ein druckfestes Schott vom Rest des Druckkörpers getrennt ist. Der Ausstieg befindet sich im Kammerboden. Durch das Aussetzen eines Ankergewichts ist ein hecklastiger Trimm von ca. 5° einstellbar, sodass sich der Bug vom Boden abhebt, während die Ruderhacke am Grund ruht. Dadurch öffnet sich für den Ein- und Ausstieg von Tauchern ein ausreichender Spalt über Grund. Die Taucher können sowohl mit autonomen Tauchgeräten als auch aus dem Boot heraus schlauchversorgt operieren. Solange die Bodenluke offen ist, steht die Kammer unterm Umgebungsdruck. So bleibt sie während des gesamten Einsatzes trocken, wie man das von Taucherglocken aus dem Offshore-Bereich kennt. Außerdem ist die Kammer beheizbar, verfügt über zwei Kojen, Sprechverbindung mit der Zentrale, Bullaugen für den visuellen Kontakt mit der Besatzung und eine Medizinschleuse. Dadurch ist eine komfortable bzw. gesundheitsschonende Dekompression mit trockener Kleidung, warmen Essen und sonst optimalen Bedingungen möglich. Je nach der Dauer der Kammerfahrt, kann das Uboot bereits auf dem Heimweg sein oder im Hafen liegen, während die Taucher ihre Dekompressionszeiten absolvieren. De facto ist die maximale Einsatztiefe der Kammer nur noch von individuellen Fähigkeiten und Ausrüstung der Taucher abhängig. Einsätze jenseits von 80 Metern Tiefe an der Grenze zum Sättigungstauchen sind somit möglich. Als Zusatzfunktion bietet sie in Notfällen einen Zufluchtsort für die Besatzung, falls die Hauptabteilung z.B. bei einem Brand oder Flutung aufgegeben werden müsste. Sie ist mit einer autonomen Atemluftversorgung, Schadstoffbindungsanlage und mit Absperrungen zum Notanblasen der vorderen Tauchzelle ausgestattet.


Grundanordnung und Hauptdaten von "Euronaut"
Entwurfsmerkmale und Technik
„Euronaut“ ist in herkömmlicher Einhüllenbauweise konstruiert. Die Hauptabmessungen sind so gewählt, dass sie einen vergleichsweise einfachen Straßentransport ermöglichen. Um dies zu unterstützen und um den Bau bzw. die Überholungen zu vereinfachen, ist der Druckkörper mit einem Flansch versehen und ist hinter dem Maschinenraumschott ohne Schneid- und Schweißarbeiten trennbar. Der druckfeste Einsteigeschacht und der leichte Turmaufbau sind ebenfalls für schnelle Montage verschraubt.






Rohbau zwischen 2009 und 2010
Der Druckkörper ist aus höherfestem Schiffbaustahl (S355J2) mit einer Hautstärke von 22 mm gefertigt. Die Spanten sind aus gewalzten Doppel-T-Profilen gefertigt, wodurch auf Kosten eines etwas höheren Gewichts die für Uboote erforderliche Rundheit kostengünstig erreicht wurde. Durch das Verschließen von zwei Spantfeldern mit dünnen Blechen wurden im Bootsinneren Kraftstofftanks mit einer Gesamtkapazität von ca. 1,2 m³ Diesel geformt. Die Kraftstofftanks werden gepumpt und nicht mit Seewasser kompensiert. Die verschraubten Frischwasser- und Abwasserzellen sind die einzigen weiteren Innentanks. Ein Tankdeck ist nicht vorhanden. Dadurch und mit Hilfe einer asymmetrischen Motoranordnung auf der Backbordseite wurde trotz eines Druckkörper-Durchmessers von nur 2,5 m über die gesamte Druckkörperlänge von 10 m ein Mittelgang mit Stehhöhe ermöglicht.
Als Überwasserantrieb dient ein 192 PS starker Saugdieselmotor. Dieser leitet sein Drehmoment über ein runtersetzendes Schalt- und Umkehrgetriebe direkt auf die Antriebswelle ein. Durch den Versatz des Dieselmotors auf die Backbordseite musste das Getriebe mit der Antriebswelle über einen Zahnriemen verbunden werden. Als Antrieb für die Unterwasserfahrt dient eine Gleichstrommaschine mit 40 kW Leistung, die über dem Getriebe platziert ist und wahlweise auch als Generator zum Laden der Fahrbatterie agiert. Den Rest des Maschinenraums beanspruchen zwei Druckluftkompressoren aus dem Tauchbedarf, eine kleine Werkbank, ein Frischwassererzeuger, Tief- und Flachlenzpumpen, ein Teil der Druckluftspeicher und sonstige Hilfsmaschinen. Einfachheitshalber wurde auf den Einsatz einer Hydraulikanlage verzichtet. Alle ferngesteuerten Aktuatoren werden elektrisch durch lineare Servomotoren betätigt.
Zwischen der Taucherkammer und dem Maschinenraum liegt eine Zentrale mit zwei Arbeitsplätzen, ein Salon mit zwei Kojen, eine kleine Pantry und ein WC. Darüber liegt der einzige Einsteigeschacht. Die Fahrbatterien sind nicht in einem separaten Raum, sondern im Salon unter den Kojen platziert. Die verwendeten wartungsfreien Glasfasermatten-Bleibatterien sind gasdicht und sind deshalb ohne Zusatzvorrichtungen zur Wasserstoffbindung einsetzbar. Deren Gesamtkapazität liegt bei 160 kWh und ermöglicht etwa 4 Stunden Tauchfahrt bei 4 Knoten. Alle „Hotellast“-Verbraucher werden durch eine separate „Navigationsbatterie“ mit einer Kapazität von ca. 20 kWh gespeist. Dadurch beträgt die Unterwasserausdauer 1-3 Tage auf dem Grund und bis zu 7 Tage im Notfall. Die Atemluftwiederaufbereitung findet durch mehrere Schadstoffbindegeräte, gefüllt mit Atemkalk und Aktivkohle statt.






Anordnung im Maschinenraum und in der Zentrale
Im Außenschiff grenzt an jedem Endboden jeweils eine Tauchzelle. Im Inneren der Tauchzellen sind kombinierte druckfeste Trimm- und Regelzellen angeordnet („Offenes Trimmsystem“). Für die kurzen Tauchstrecken ist diese Anordnung ausreichend und vereinfacht die Bootskonstruktion. Insgesamt wurde beim Projekt ein besonderes Augenmerkt auf die kostengünstige Fertigung und Wartung gesetzt. Es gibt eine minimale Anzahl an Druckkörperdurchführungen und fast die gesamte außenliegende Ausrüstung befindet sich im Oberdeck, wo sie durch die schwenkbare Decksbeplattung schnell erreicht werden kann.
Um den Propeller während des Betriebs in Grundnähe vor Schäden durch Grund- und Wrackberührungen zu schützen, ist das Kreuzruder klassisch hinter dem Propeller angeordnet und durch massive Lagerbügel bzw. die Ruderhacke wirksam verdeckt. Eine besonders hohe Manövrierfähigkeit ist durch die Ausrüstung mit zwei Querstrahlrudern und einer 500 kg schweren Trimmplatte sichergestellt. Die Trimmplatte liegt im Salon unter dem Flurboden und kann während des Tauchbetriebs
durch ihre Längsbewegungen automatisch die Trimmmomente kompensieren.
Besondere Aufmerksamkeit wurde den Sicherheitssystemen an Bord geschenkt. So verfügt die „Euronaut“ über ein zentral auslösbares stationäres Feuerlöschsystem mit Hochdrucknebelerzeugung, ein Notatemsystem mit trennbaren Atemreglern und insgesamt 3 t an Abwurfballast unterm Kiel. Zusätzlich ist die Brandlast der Taucherkammer angesichts der hohen Sauerstoffpartialdrücke während ihres Betriebs so weit wie möglich gesenkt. Die meisten sicherheitsrelevanten Systeme sind redundant ausgeführt. Zwar sind alle Bordabsperrungen einfach ausgeführt, aber deren Anzahl wurde auf das nötige Minimum reduziert. Als Beispiel dafür ist das Motorkühlwassersystem zu nennen, welches über einen geschlossenen Kreislauf mit einem Wärmetauscher unterm Kiel verfügt. Dadurch werden ein Kaltwassersatz und große seewasserführende Leitungen im Bootsinneren eliminiert. Dasselbe gilt für das nach außen verlagerte Trimm- und Regelsystem.











Ebenso gehört ein geringer Automatisierungsgrad des Ubootes zu seinem Sicherheitskonzept. Bordcomputer werden ausschließlich zur Überwachung und nicht zur Steuerung genutzt. Die eigene Positions- und Geschwindigkeitsbestimmung in Überwasserfahrt erfolgt über einen GPS-Empfänger. Unterwasser steht nur ein einfacher Kreiselkompass zur Verfügung. Angesichts der sehr kurzen Unterwasserfahrstrecken besteht kein Bedarf für eine weitere technische Unterstützung der Koppelnavigation. Umso größere Bedeutung haben aktive Sonare, die der Wracksuche, Kollisionsvermeidung und der Bestimmung der Grundbeschaffenheit dienen. Das Uboot verfügt über ein vorausschauendes Fächersonar, ein Seitensichtsonar mit Echolotfunktionalität und ein nach vorne gerichtetes Echolot, das als Kollisionsmeidesonar agiert. Die optische Aufklärung erfolgt über eine in einem Optronikmast integrierte schwenkbare Überwachungskamera. Zusätzliche starre Kameras sind in einem Mehrzweckmast untergebracht, der darüber hinaus einen GPS-Empfänger, Navigationsbeleuchtung, UMTS-Modem für den küstennahem Mobilfunkempfang und Decksbeleuchtung beherbergt. Alle Masten werden manuell ein- und ausgefahren.


















Bisherige Einsätze
In den ersten acht Jahren seit seiner Indienststellung befand sich das Uboot im Erprobungs- und Trainingsbetrieb. Mit der Verlegung an die Ostsee entfielen zwar lange Revierfahrten entlang der Weser und im Wattenmeer, jedoch erlaubte der Hobby-Charakter des Projekts, bzw. familiäre und berufliche Verpflichtungen der Besatzungsmitglieder meistens nur Tagesfahrten. Als Ziele dienten die nähergelegenen bekannten Wrackpositionen oder auffällige geologische Unterwasserformationen. Zu den Highlights gehörten dabei zwei längere Expeditionen in der Mecklenburger Bucht und vor der dänischen Insel Mön. Während der ersten Expedition im Jahr 2015, die von einem Kamerateam begleitet wurde, fand ein sechsstündiger Tauchereinsatz mit einer Wrackvermessung in 23 m Tiefe statt. Bis heute (Stand April 2024) handelt es sich um den tiefsten Tauchgang, der mit dem Uboot unternommen wurde. Die zweite Expedition wurde 2019 in Kooperation mit einer Umweltschutzorganisation durchgeführt. Dabei wurde eine neue Ankeranlage getestet, die einen sicheren Taucherbetrieb selbst in 6 m Tiefe ermöglichte, was physikalisch bedingt vielfach schwieriger ist, als in großen Tiefen. Des Weiteren gelang es der Besatzung, ein in Seekarten verzeichnetes Wrack mit Sonaren aufzuspüren und das Uboot gezielt in 13 m Entfernung vom Objekt auf dem Grund zu positionieren.
Da der Taucherkammerbetrieb zuletzt ausschließlich mit Druckluft als Atemgas erfolgte, ist die maximale Tiefe für Unterwasserausstiege auf ca. 30 m limitiert. Längerfristig war die Ertüchtigung der Taucherkammer für den Betrieb mit heliumhaltigen Atemgemischen vorgesehen. Bis dahin sollen Wrackerkundungen in größeren Tiefen mit Hilfe einer 2019 beschafften drahtgelenkten Unterwasserdrohne (ROV, Remotely Operated Vehicle) erfolgen. Seit Ende 2020 befindet sich "Euronaut" in Grundüberholung auf dem Gelände von Tamsen Maritim, was das Boot eine modernsierete Ruder- und Propelleranlage, neue Druckluftspeicher und Batterien erhält.


Kommentare